
Master student Ivan Rodriguez presented his work at ICPR conference in Beijin:
Ivan F. Rodríguez, Rémi Mégret, Roian Egnor, Kristin Branson, José L. Agosto, Tugrul Giray, Edgar Acuña . “Multiple Insect and Animal Tracking in Video using Part Affinity Fields”, Visual observation and analysis of Vertebrate And Insect Behavior (VAIB), International Conference on Pattern Recognition (ICPR), Beijin, China, 20-24 August 2018. [PDF]
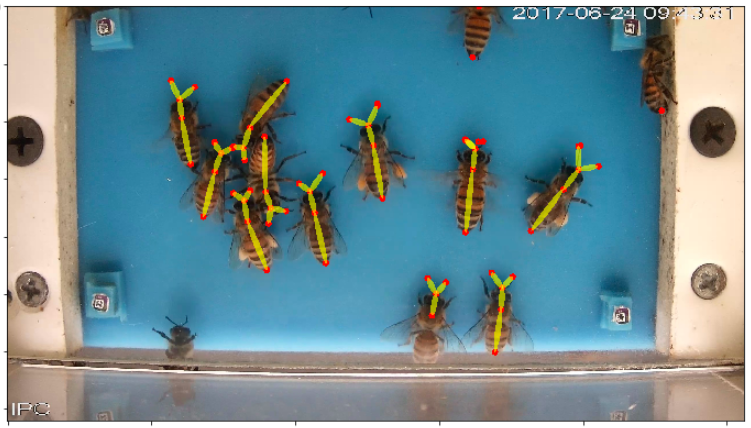
Pose estimation consists in detecting the parts (head, thorax, abdomen, and the two antennas) of all honeybees automatically, and connecting them to produce a “skeleton” for each individual. Using a Deep Convolutional Network, all bees in the same image are processed jointly without the need of detecting the bees in advance.
Tracking then produces trajectories that can be classified at entering/exiting automatically.